 )
)
Description
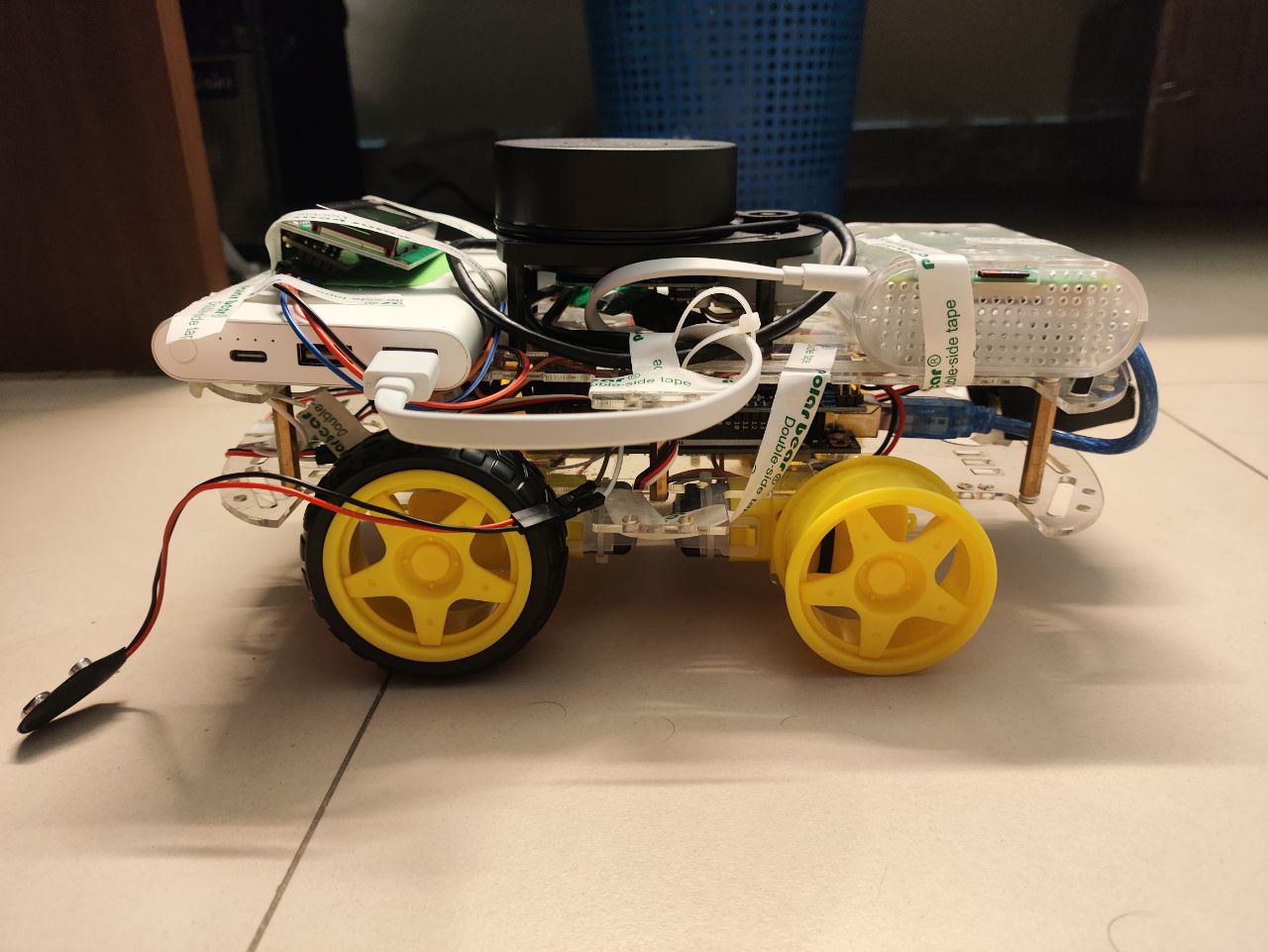
Led a team in the design and development of a state-of-the-art remote-controlled search and rescue robot.
Problems Addressed
Addressing the need for advanced navigation and mapping capabilities in search and rescue missions, enhancing efficiency and safety.
Technical Skills Displayed
Built using C++, Arduino on Raspbian OS, ROS (Robot Operating System), and RPLIDAR. The robot includes functionalities like 4 Directional Movement, Custom Display Text on LCD, Color Identification, and Mapping using Lidar and RViz.